

This differential equation can be re-arragned as

or

Where 

critical damping coefficient,

damping ratio,

natural frequency,

Therefore, 




Solving for the general solution to this system,
Start by identifying the roots of the system and obtaining the general solution.
Roots of the auxiliary equation





General solution to the second order differential equation,

Simplify the notation by using 


Use the known condition to solve for constant A and B


 and
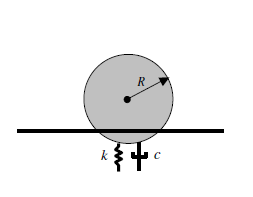
and  . The mass damping ratio parameter is
. The mass damping ratio parameter is  and
and  is the natural undamped circular frequency of the mass-spring system. The result of this analysis determines the value of viscous damper as a function of particle mass, normal contact stiffness and the coefficient of restitution.
is the natural undamped circular frequency of the mass-spring system. The result of this analysis determines the value of viscous damper as a function of particle mass, normal contact stiffness and the coefficient of restitution.
 to the initial normal component impact velocity
to the initial normal component impact velocity  . Then the coefficient of restitution e is
. Then the coefficient of restitution e is

 and
and  are the initial height of the ball when released with zero velocity and the maximum height of the ball after impact, respectively.
are the initial height of the ball when released with zero velocity and the maximum height of the ball after impact, respectively.