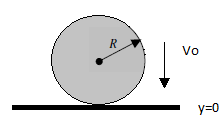
Condition 1: At time = 0 and position y = 0


Therefore: A = 0
To use the condition of 







This brings our position and velocity equations to:


The goal of solving this system is to extract the damping coefficient. To do this, evaluate the system at the instant the particle rebounds from the ground.
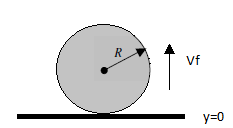
These conditions are: y = 0, 

First we need to determine
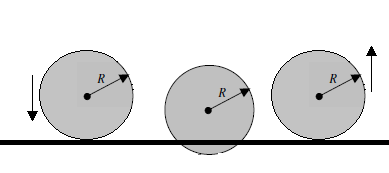
The equation for position is a sine wave of the form:


The sine wave has a period T and the time elapsed during that period is T/2, where
period,

Therefore,
time,

Solving the velocity equation at the determined conditions: 


Using this information for 



Bringing out system to its initial terms: m, k, c




![(\sqrt{1-\zeta^2}) [ln(e)]^2 = \pi^2 \zeta^2](https://s0.wp.com/latex.php?latex=%28%5Csqrt%7B1-%5Czeta%5E2%7D%29+%5Bln%28e%29%5D%5E2+%3D+%5Cpi%5E2+%5Czeta%5E2&bg=f3f3f3&fg=404040&s=0&c=20201002)
![[ln(e)]^2 - \zeta^2 [ln(e)]^2 = \pi^2 \zeta^2](https://s0.wp.com/latex.php?latex=%5Bln%28e%29%5D%5E2+-+%5Czeta%5E2+%5Bln%28e%29%5D%5E2+%3D+%5Cpi%5E2+%5Czeta%5E2&bg=f3f3f3&fg=404040&s=0&c=20201002)
![\pi^2 \zeta^2 + \zeta^2 [ln(e)]^2 = [lkn(e)]^2](https://s0.wp.com/latex.php?latex=%5Cpi%5E2+%5Czeta%5E2+%2B+%5Czeta%5E2+%5Bln%28e%29%5D%5E2+%3D+%5Blkn%28e%29%5D%5E2&bg=f3f3f3&fg=404040&s=0&c=20201002)
![\zeta^2 (\pi^2 + [ln(e)]^2) = [ln(e)]^2](https://s0.wp.com/latex.php?latex=%5Czeta%5E2+%28%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%29+%3D+%5Bln%28e%29%5D%5E2&bg=f3f3f3&fg=404040&s=0&c=20201002)
![\zeta^2 = \frac{[ln(e)]^2}{\pi^2 + [ln(e)]^2}](https://s0.wp.com/latex.php?latex=%5Czeta%5E2+%3D+%5Cfrac%7B%5Bln%28e%29%5D%5E2%7D%7B%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%7D&bg=f3f3f3&fg=404040&s=0&c=20201002)
Recall:
damping ratio,

![(\frac{c}{2 \sqrt{km}})^2 = \frac{[ln(e)]^2}{\pi^2 + [ln(e)]^2}](https://s0.wp.com/latex.php?latex=%28%5Cfrac%7Bc%7D%7B2+%5Csqrt%7Bkm%7D%7D%29%5E2+%3D%C2%A0%5Cfrac%7B%5Bln%28e%29%5D%5E2%7D%7B%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%7D&bg=f3f3f3&fg=404040&s=0&c=20201002)
![\sqrt{(\frac{c}{2 \sqrt{km}})^2 }= \sqrt{\frac{[ln(e)]^2}{\pi^2 + [ln(e)]^2}}](https://s0.wp.com/latex.php?latex=%5Csqrt%7B%28%5Cfrac%7Bc%7D%7B2+%5Csqrt%7Bkm%7D%7D%29%5E2+%7D%3D+%5Csqrt%7B%5Cfrac%7B%5Bln%28e%29%5D%5E2%7D%7B%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%7D%7D&bg=f3f3f3&fg=404040&s=0&c=20201002)
![\frac{c}{2 \sqrt{km}}= \frac{ln(e)}{\sqrt{\pi^2 + [ln(e)]^2}}](https://s0.wp.com/latex.php?latex=%5Cfrac%7Bc%7D%7B2+%5Csqrt%7Bkm%7D%7D%3D+%5Cfrac%7Bln%28e%29%7D%7B%5Csqrt%7B%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%7D%7D&bg=f3f3f3&fg=404040&s=0&c=20201002)
![c = \frac{2\sqrt{km}ln(e)}{\sqrt{\pi^2 + [ln(e)]^2}} = \frac{2\sqrt{km}ln(\frac{1}{e})}{\sqrt{\pi^2 + [ln(\frac{1}{e})]^2}}](https://s0.wp.com/latex.php?latex=c+%3D%C2%A0%5Cfrac%7B2%5Csqrt%7Bkm%7Dln%28e%29%7D%7B%5Csqrt%7B%5Cpi%5E2+%2B+%5Bln%28e%29%5D%5E2%7D%7D+%3D+%5Cfrac%7B2%5Csqrt%7Bkm%7Dln%28%5Cfrac%7B1%7D%7Be%7D%29%7D%7B%5Csqrt%7B%5Cpi%5E2+%2B+%5Bln%28%5Cfrac%7B1%7D%7Be%7D%29%5D%5E2%7D%7D&bg=f3f3f3&fg=404040&s=0&c=20201002)
This defines the viscous damping coefficient.
